管理人のイエイリです。
家庭用のお掃除ロボは自分で経路を判断できる“自律走行”という機能が付いていますが、買ってきた直後、家の大きさや間取りなどがわかっていないので、ランダムに動き回り、掃除時間も長くなりがちです。
しかし、一度、間取りなどを学習してた後は、部屋から部屋へと効率的に動き、ムダのない仕事をしてくれるようになります。
今後、ビル内の巡回点検などの作業に様々なロボットが使われるようになると、ビル内の移動経路や点検する設備の位置を、お掃除ロボのように行うと時間もかかって大変ですね。
また、点検対象となる配管や扉、照明などの設備の位置を、人間がロボットに教え込むのも手間がかかります。
そこでイクシス(本社:神奈川県川崎市)と大成建設は、ビルの設備点検用ロボットに移動経路や点検対象物の位置を教え込む方法として、
ナ、ナ、ナ、ナント、
BIMモデルを活用
する技術を開発、見事、実証実験に成功したのです。(イクシスのプレスリリースはこちら)
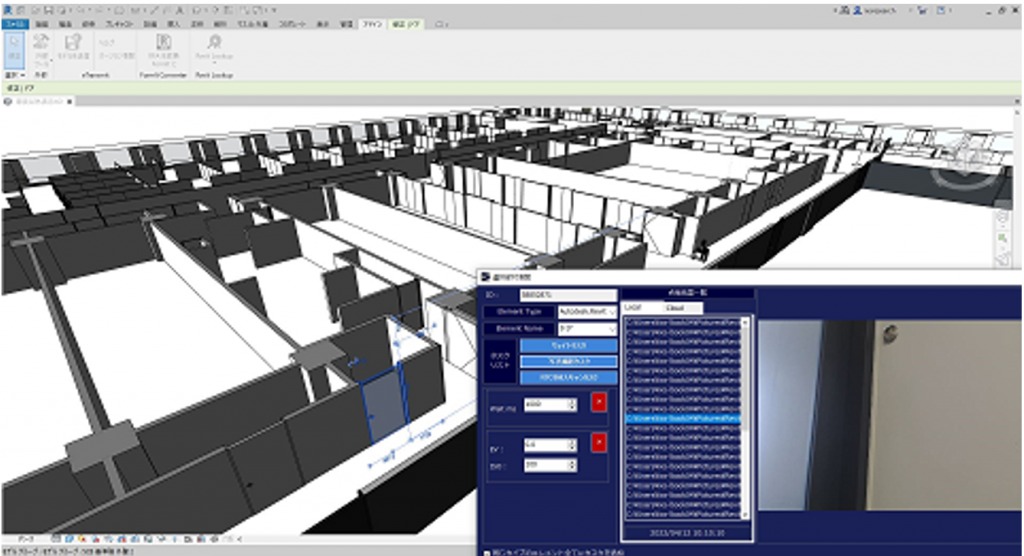
ロボットにビル内の経路を教えるために使われたBIMモデル。右下の画面はロボットが撮影した点検写真をBIMモデルと照合して確認しているところ(特記以外の資料、写真:イクシス)
この実証実験では、イクシスが開発した「i-Con Walker」の技術を活用しました。BIMモデルとロボットを双方向に連携し、自動巡回ロボットの行動計画を作ったり、逆にロボットが現場で取得した情報をBIMモデルに反映したりできます。(詳しくは、2021年4月22日付の当ブログ記事を参照)
今回の実証実験では、ビルの竣工BIM(ビルディング・インフォメーション・モデリング)モデルを活用して、ビル内の経路や点検対象となる設備の位置データを自動作成し、点検ロボットに教え込みました。
そして、大成建設が運用するオフィスで、点検ロボットを実際に稼働させ、教え込んだ通りに設備の写真撮影をしてくることに成功したのです。
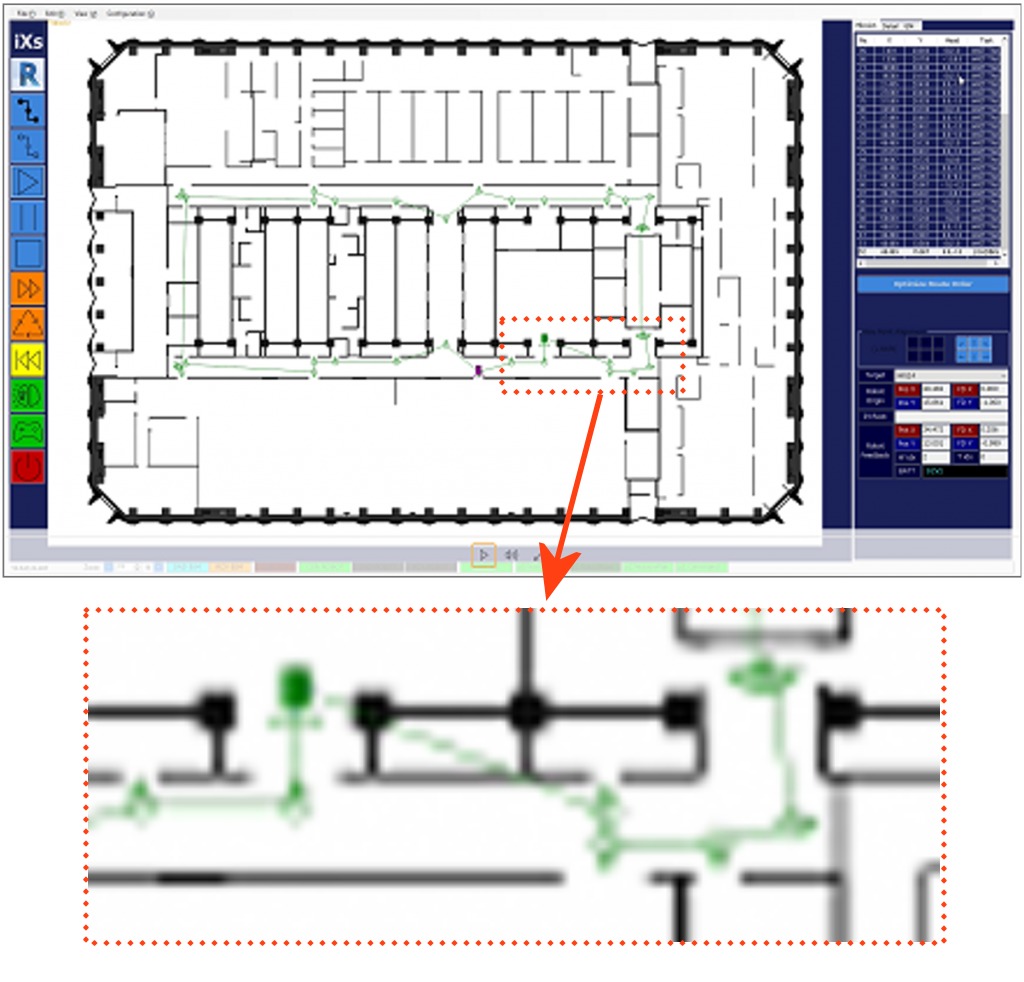
BIMモデルをもとに自動生成された点検経路(緑色の線)

ロボットが点検対象のドア前に停止し、写真撮影しているところ(左)。実際に撮影された写真(右)
この方法を使うと、複数のロボットにビル内の経路をおぼえこませる手間が時間が大幅に削減されます。
つまり、人間とロボットの間で、
BIMを共通言語
として使い、意思疎通を図ることに成功したというわけですね。
一方、大成建設は今後、ビル内で点検のほか搬送や案内、清掃、警備などの仕事を行うロボットが増えることを想定して、様々なロボットとビル設備との連携を一元管理するロボット統合管制プラットフォーム「RoboHUB」を開発しました。(大成建設のプレスリリースはこちら)
異なるメーカーのロボット同士が衝突するのを防いだり、ロボットとエレベーターや自動ドアを使ったりと、5つの機能を備えています。

ロボットがエレベーター呼び出し、乗ろうとしているところ(左)。出合い頭の衝突などを防ぐ機能(右)
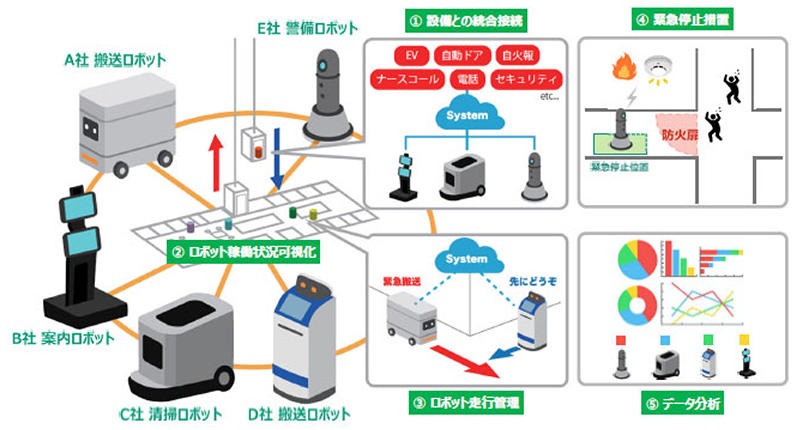
「RoboHUB」の主な5つの機能(以下の資料、写真:大成建設)
| ●「RoboHUB」の主な5つの機能
1 ロボットと建物設備との統合接続による連携 2. ロボットの稼働状況を可視化 3. ロボットの走行を管理 4.災害時の緊急停止 5. データ分析による効率的なロボット利用などを提案 |
大成建設は、「RoboHUB」を同社の施設で稼働させ、複数のロボットの走行管理やビル設備との連携を行う実証実験を行ったところ、その有効性を確認しました。
今後は引き続き、様々なロボットで検証を行い、人とロボットが共存する最適な動線計画やビル設備と連携できる施設設計を検討していきます。
そして2023年1月に交雄会新さっぽろ病院(札幌市)や多摩丘陵病院(町田市)など、複数の病院で「RoboHUB」のサービス提供を開始する予定です。
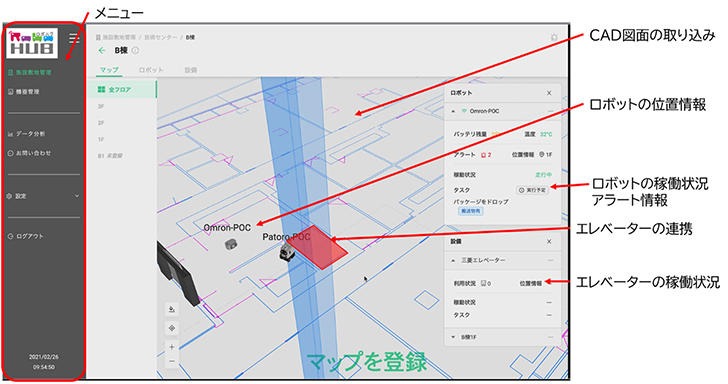
「RoboHUB」の画面でロボットやビル設備の稼働状況などを確認したところ
ロボットがビル内の仕事をするようになると、建物や設備の設計もロボットが働きやすくなるように、変わっていきそうですね。