管理人のイエイリです。
少子高齢化による労働力不足で、人間の作業員は技能や熟練が必要な加工・取り付け作業に集中し、そうでない仕事はなるべく機械に任せるという仕事の分担が求められています。
そこで大林組と三井不動産は、工事現場内で資材を自動搬送するロボットの共同開発に乗り出しました。
ナ、ナ、ナ、ナント、
エレベーターを乗り降り
しながら、必要な場所に必要な資材を配達してくれるのです。(三井不動産のプレスリリースはこちら)

工事資材を載せたパレットに潜り込もうとする自動搬送ロボット(以下の写真、資料:大林組、三井不動産)
このロボットは、大林組が以前、開発した低床式AGV(Auto Guided Vehicle、詳細は当ブログ2015年10月23日付けの記事を参照)をベースに、各種機能を加えたものです。
賢くなったのは、運ぶべき資材をロボット自身が探して持ち上げ、仮設エレベーターのオペレーターに現在の階と行き先の階をタブレットを介して伝えられるようになったことです。
この自動化を実現するため、パレットは形と色を統一した専用のものを用意したほか、ロボットには2つのカメラを搭載しました。
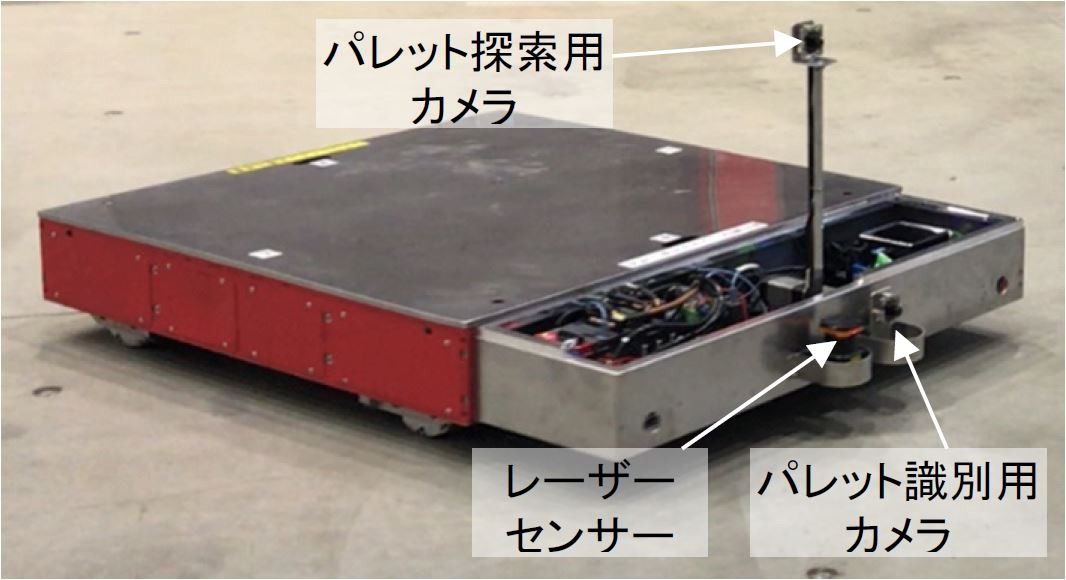
目的のパレットを探す2台のカメラと、周囲の障害物などを認識するレーザーセンサーを搭載
パレットを探すときは、「パレット探索用カメラ」を潜水艦の潜望鏡のように立ち上げて周囲を“捜索”します。
目的のパレットが見つかったときは、「パレット識別用カメラ」で、パレットに張った2次元マーカーを読み取り、その下に潜り込んで搬送を開始します。

パレットの端部には2次元マーカーが張ってある

左側のパレットの下に潜り込んだロボット
搬送中は
レーザーセンサー
で周囲の障害物や自分の位置を認識しながら、目的地まで移動します。
以前は自動運転の際、軌道となる磁気テープを張る必要がありましたが、その必要もなくなりました。

レーザーセンサーによって認識した周囲の障害物など
同じ階での水平移動は、ロボットが自動的に行います。仮設エレベーターのオペレーターは、タブレットに送られてくるロボットからリクエストに応じて、上下階の移動を手伝うだけです。
三井不動産は今後、ロボットの開発を進めてオフィスビルや物流倉庫などの新築工事で標準採用を目指すほか、ビルの稼働後もゴミの自動搬送などに応用していく方針です。
一方、大林組は高層ビルなどの工事で夜間自動搬送を実現し、さらなる省人化を目指します。
人がいなくなった夜間の現場では、ロボットたちが資材搬送や墨出し作業に“汗を流す”時代になりつつあるようですね。