管理人のイエイリです。
住宅を施工する作業員にとって大変なのは、天井の石膏(こう)ボードを張る作業です。重い石膏ボードを高いところに持ち上げ、上向き姿勢で位置決めやビス止めを行う動作を、何度も繰り返す必要があるからです。
そこで積水ハウスは
ナ、ナ、ナ、ナント、
2台のロボットで協調作業
を行い、この大変な作業を軽減する技術の開発にメドをつけたのです。(積水ハウスのプレスリリースはこちら)
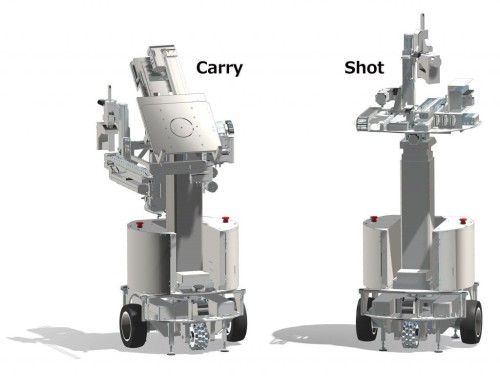
石膏ボードを天井に取り付ける2台のロボット。運搬・持ち上げロボット「Carry」(左)と、ビス固定ロボット「Shot」(右)(写真:テムザック)

2台のロボットが連携し、天井に石膏ボードを取り付けているところ(以下の写真、資料:積水ハウス)
2台のロボットは住宅の施工現場に持ち込みやすいように、人間くらいの大きさに小型・軽量化され、AI(人工知能)を搭載しています。
作業の分担は、石膏ボードの運搬や持ち上げを担当するロボットが「Carry」と、ボードをビスで固定するロボットが「Shot」です。
天井張りの作業は、現場の寸法に合わせて施工する「現場合わせ」が必要です。
そこで、ロボット「Carry」にはカメラが搭載されており、作業前に取り付け部分を撮影し、寸法を計測します。作業員はタブレットに表示された寸法に従って石膏ボードを切断し、「Carry」に渡すと、後は2台のロボットたちが連携して位置決めやビス止めを行ってくれるのです。
<天井石膏ボード張り施工の手順>
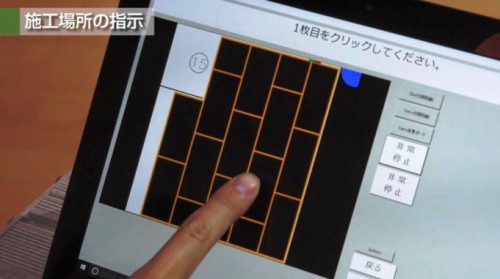
(1)タブレットで天井ボードを張り付ける位置を選ぶ

(2)ロボット「Carry」のカメラで下地を撮影し、寸法をタブレットに転送し表示

(3)タブレットに表示された下地寸法にしたがって、作業員が石膏ボードを切断・加工

(4)加工した石膏ボードを「Carry」に渡す

(5)「Carry」がボードを持ち上げ、「Shot」に搭載されたカメラでセンシングを行いはめ合わせる

(6)「Carry」が仮固定し、「Shot」が連携してビス固定する

作業中、2台のロボットはお互いにコミュニケーションを取り、助け合っています。
例えば、大きな石膏ボードを持ち上げると、「Carry」の視界が悪くなるので、代わりに「Shot」が位置情報を確認し、適切な位置を「Carry」に指示します。
また、お互いの位置や作業状況も把握できるので、「Carry」が石膏ボードを運んでいる時、「Shot」は相手の可動範囲を認識して、作業のじゃまにならないように移動します。

2台のロボットは作業中にコミュニケーションを取りながら、作業を手伝ったり、じゃまにならないように動いたりする
これらのロボットの開発は、積水ハウスが2015年から、ロボット開発で実績のあるテムザック(本社:福岡県宗像市)と共同で進めています。
ロボットはBIM(ビルディング・インフォメーション・モデリング)を核としており、積水ハウス独自のCADシステムのほか、建物情報や部材情報を持つ「邸住宅データペース」と連携しています。
このほど、住宅の施工現場での活用にメドがついたため、2020年の実用化を目指して、開発は大きく前進することになりました。

天井施工用ロボット開発の歴史
これらのロボットを使うことで、作業員の負担は
最大7割も軽減
されるそうです。
実用化のポイントは、100%をロボットで施工しようとせず、人間がやった方が早かったり、効率的だったりするところは要所要所で人間が手伝う方式を採用したことでしょう。
というのは世の中には「80:20の法則」(パレートの法則)という経験則があり、100%の成果を得るのに100の努力が必要だとすると、80%の成果を得るのはわずか20の努力で済むということが、一般に言われているからです。
そのため、100%をロボットで施工するのに比べて、70%程度を目指すことにより、ロボットの開発期間は圧倒的に短くて済むという理屈になります。
建設現場のロボット化や設計業務のAI化を考えるとき、仕事の7~8割をロボットやAIに任せ、残りは人間が手伝うという分業の仕方を考えるのがコツではないかと、積水ハウスの取り組みを見て痛感しました。